Refactoring IMU Driver (Part 1): Start from scratch
Vendor's code is legacy. WIT driver need to be modern
Modern ROS2 WIT IMU Driver DevLog - 1. Into the Wild
0. Intro: Back to the Wild
While refactoring and releasing the RPLIDAR driver previously, I realized one thing: people are just as interested in the “struggles and problem-solving process” as they are in the finished code.
This time, my target is WIT MOTION’s IMU, a rising player in the industry. While it offers an excellent price-to-performance ratio, its support within the ROS2 environment is truly the “Wild West.” In this series, I plan to document the process of taming this wild territory to build a robust driver that complies with Modern C++ and ROS2 Lifecycle standards.
1. Information Gathering: To Avoid Reinventing the Wheel
The first step in development is always preliminary research. If someone has already built the perfect driver, I could simply enjoy the luxury of a git clone.
1.1 Official Repository Analysis: Opening Pandora’s Box
1.1.1 The “Department Store” Strategy
Upon visiting the manufacturer’s official GitHub, I didn’t find a polished software engineering project, but rather a “General Store” approach.
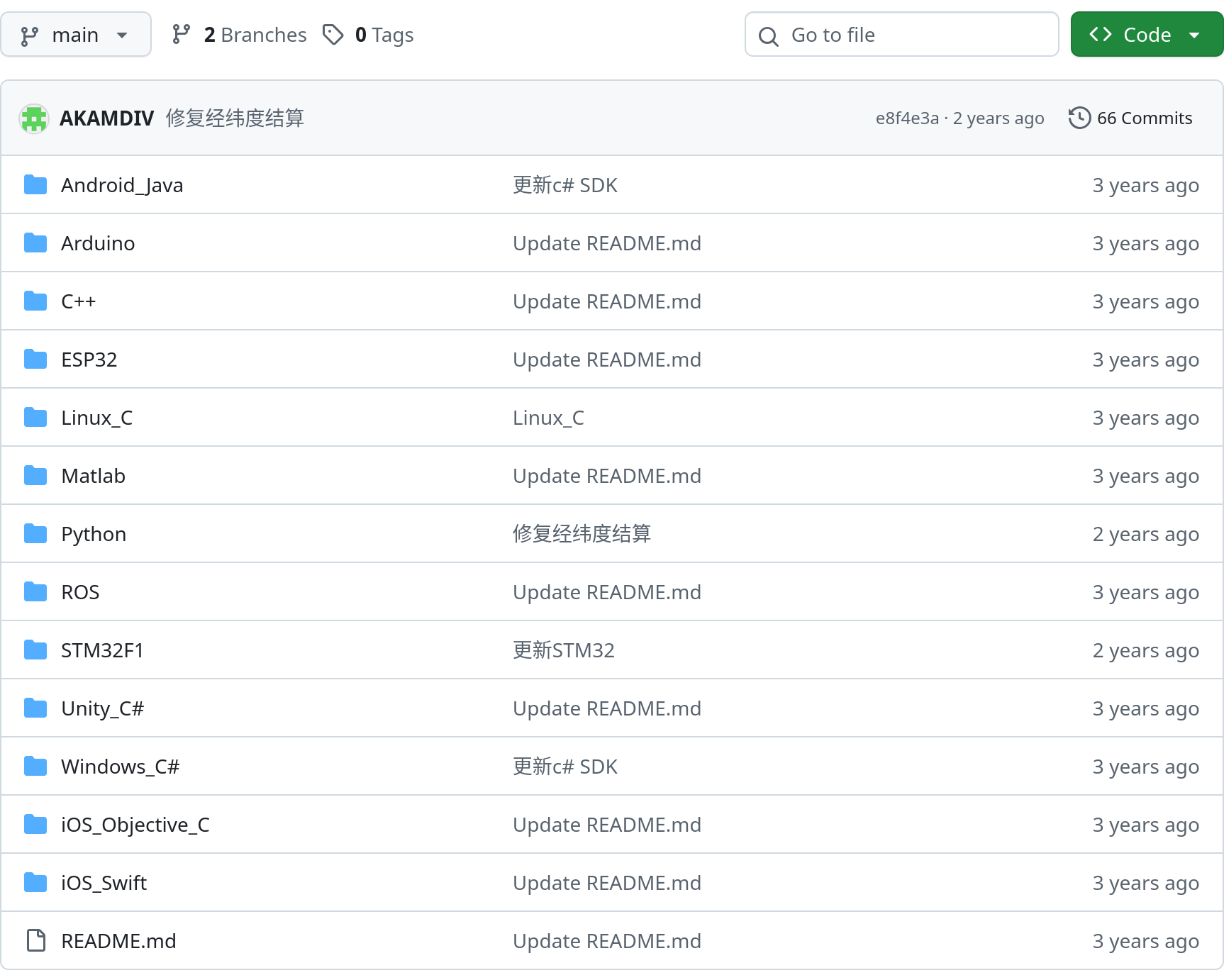
Looking at the folder structure, the manufacturer’s strategy is clear: “We prepared everything because we didn’t know what you would use.” While this “kitchen sink” approach might be rational for a hardware manufacturer, for a robotics software engineer, it signals that “nothing is maintained with any real depth.”
I focused on analyzing the core layers: Serial (Transport), SDK (Parser), and ROS2 Node (Application). Unfortunately, I discovered structural flaws that are unacceptable from an engineering standpoint.
1.1.2 Transport Layer: A Relic from the 90s
Path: Linux_C/normal/serial.c
First, I examined the serial communication code, which acts as the entry point for data. Surprisingly, it was not written in Modern C++, but preserved as a fossil of 1990s embedded C style.
Busy Waiting (CPU Waste): It is implemented using a polling method with
VTIME=0andVMIN=0. This causes the CPU to consume cycles in an infinite loop even when no data is available. It is like putting a tractor engine in a high-performance robot PC.Lack of RAII: Resource management is manual. The developer must manually handle
openandclosefunctions, and there is virtually no exception handling.Hardcoded Settings: Configuration options, such as Baudrate, are hardcoded, offering zero scalability.
1.1.3 SDK Layer: A Feast of Global Variables
Path: Linux_C/normal/wit_c_sdk.c
The SDK layer for parsing data is even more concerning. It has a structure that directly contradicts Object-Oriented Programming (OOP) principles.
Lack of Thread-Safety: All key data buffers are declared as
staticglobal variables. This implies that the driver supports “only one sensor per process.” If you were to mount two IMUs on a robot, the data would overlap, likely causing a system crash.Callback Issues: It uses pure C function pointers without considering C++ class member functions. This makes integration into modern C++ projects very difficult.
1.1.4 Application Layer: ROS1 Code Disguised as ROS2
Path: ROS/wit/wit_ros_ws/src/scripts/wit_normal_ros.py
The most shocking part was the Python script provided as a “ROS2 Node.” While the filename said ROS2, the internal code was full of legacy patterns from the ROS1 era.
Blocking Calls (Critical): It uses
time.sleep(0.1)inside callback functions. This paralyzes the ROS single-threaded callback system, potentially freezing the robot for 0.5 seconds during operation.Legacy Version Checks: The code includes
if python_version == '2':. Since ROS2 is strictly Python 3 based, this proves the code is a result of old “copy-paste” practices.Global Variable Abuse: Dozens of unmanaged global variables are scattered throughout the code, making maintenance impossible.
1.1.5 Conclusion: Not Production Ready
In conclusion, while the official (or semi-official) code might suffice for a “demo to check if the sensor works,” it is absolutely unsuitable for a “Robotics Product” where reliability is paramount.
This is precisely why I must reinvent the wheel—or rather, why I must “forge a proper wheel.”
1.2 Issue & PR Analysis
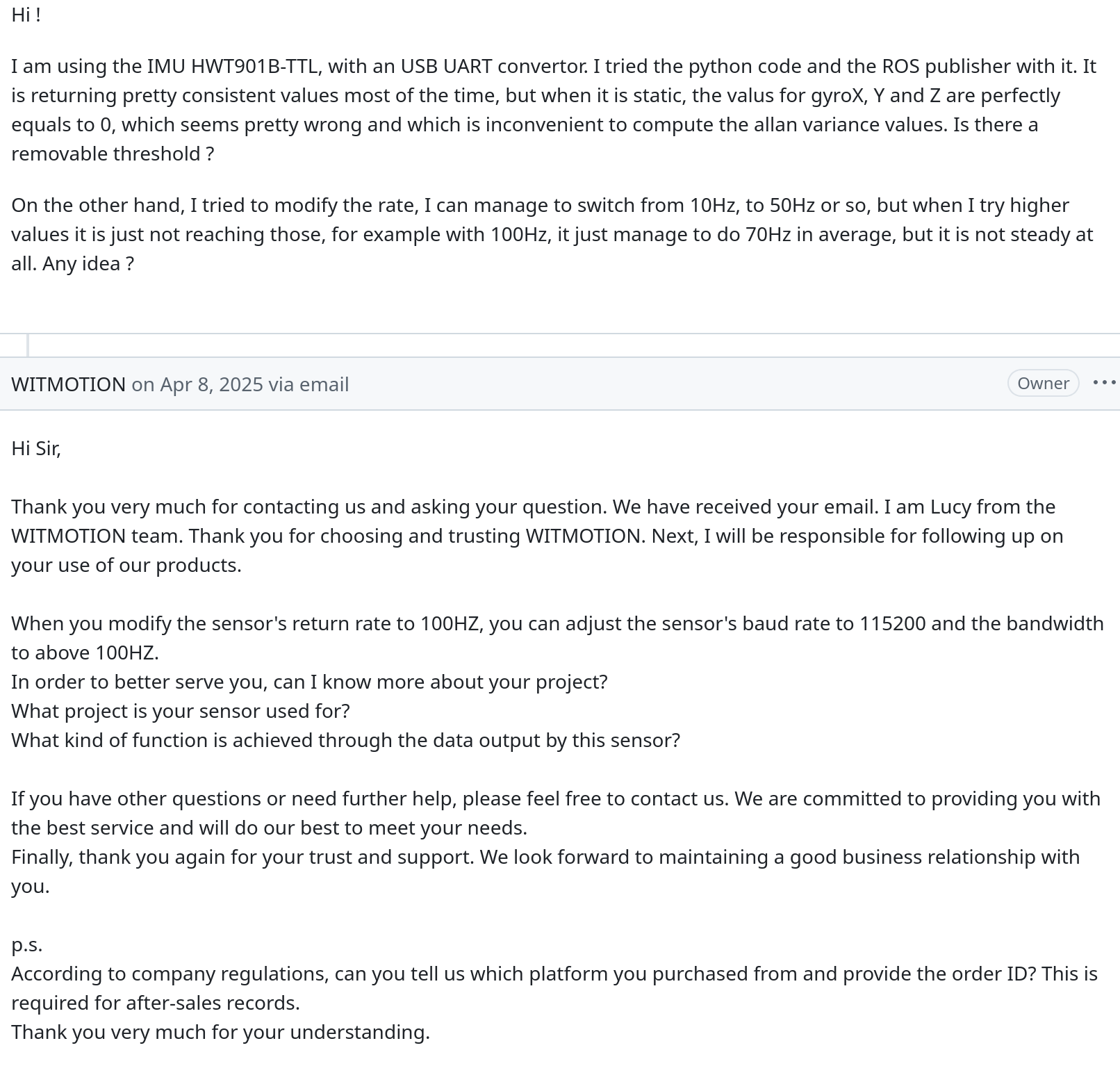
To gauge the user sentiment towards the repository, I visited the Issue tab.
Lack of Maintenance: While issues are open, almost none have been resolved and closed properly. Most are either closed by the authors themselves out of frustration or simply left abandoned.
Irrelevant Responses: In response to a query like “The 50Hz setting doesn’t work in ROS2,” the replies seem to come from a CS agent simply copy-pasting the manual rather than a developer. This is clear evidence that no meaningful technical communication is taking place.
PR (Pull Request): There are no meaningful contributions or merged codes. This indicates that the project is no longer being improved.
1.3 Forks & Insight
Hoping that perhaps a “hidden master” had forked and fixed the code, I dug into the Insight tab.
- Result: There were no starred forks, nor any repositories with meaningful additional commits. It seems truly no one has touched it.
1.4 GitHub Search Results
I searched GitHub for unofficial codes and found a few drivers written in Python and one C++ project that, while functional, had room for improvement.
Python Version: Excluded due to performance and real-time constraints.
C++ Version: There is an existing project that functions well. However, to achieve the core objectives of this project—implementing ROS2 Lifecycle Nodes and a flexible Component-based structure—I concluded that designing from scratch is more appropriate than modifying the existing code structure.
2. Strategy Formulation
I have secured the official protocol documentation and datasheets. The hardware specs are innocent; only the software is guilty.
2.1 Target Model Selection
While supporting every model would be ideal, I decided to focus on the three most cost-effective models commonly used in robot development: WT901C, WT61C, and WT931.
2.2 Development Goals
ROS2 Lifecycle Node Application: Ensuring system stability through a managed state machine.
Strict Type Checking: Strengthening data integrity verification for serial communication.
Zero-Copy: Minimizing unnecessary memory copying.
Now, let’s go devour that datasheet.
[Closing: For Those in a Hurry]
This project is expected to proceed with a long-term view to achieve my personal engineering goals of mastering Modern C++ and strictly adhering to ROS2 Lifecycle standards. (This is the unavoidable reality of a full-time employee developing in spare time after work.)
Therefore, if you need to deploy a robot right now and functional operation (Topic Publish) is your top priority, I recommend checking out the existing C++ repository (Ericsii/ros_wit_imu_node) mentioned earlier.
However, if you are interested in stable state management (Lifecycle) and the struggles of the development process, I invite you to subscribe to this series and join me in pioneering this ‘wild land’.